Publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
- RSS
 Leveling the Playing Field: Carefully Comparing Classical and Learned Controllers for Quadrotor Trajectory TrackingPratik Kunapuli, Jake Welde, Dinesh Jayaraman, and Vijay KumarProceedings of Robotics: Science and Systems (RSS), 2025
Leveling the Playing Field: Carefully Comparing Classical and Learned Controllers for Quadrotor Trajectory TrackingPratik Kunapuli, Jake Welde, Dinesh Jayaraman, and Vijay KumarProceedings of Robotics: Science and Systems (RSS), 2025Learning-based control approaches like reinforcement learning (RL) have recently produced a slew of impressive results for tasks like quadrotor trajectory tracking and drone racing. Naturally, it is common to demonstrate the advantages of these new controllers against established methods like analytical controllers. We observe, however, that reliably comparing the performance of such very different classes of controllers is more complicated than might appear at first sight. As a case study, we take up the problem of agile tracking of an end-effector for a quadrotor with a fixed arm. We develop a set of best practices for synthesizing the best-in-class RL and geometric controllers (GC) for benchmarking. In the process, we resolve widespread RL-favoring biases in prior studies that provide asymmetric access to: (1) the task definition, in the form of an objective function, (2) representative datasets, for parameter optimization, and (3) “feedforward” information, describing the desired future trajectory. The resulting contributions are the following: our im- provements to the experimental protocol for comparing learned and classical controllers are critical, and each of the above asymmetries can yield misleading conclusions. Prior works have implied that RL outperforms GC, but we find the gaps between the two controller classes are much smaller than previously pub- lished when accounting for symmetric comparisons. Geometric control achieves lower steady-state error than RL, while RL has better transient performance, resulting in GC performing better in relatively slow or less agile tasks, but RL performing better when greater agility is required. Finally, we open-source implementations of geometric and RL controllers for these aerial vehicles, implementing best practices for future development. Code, videos, and more can be found on the project website: https://pratikkunapuli.github.io/rl-vs-gc/
- NeurIPS / ICRA
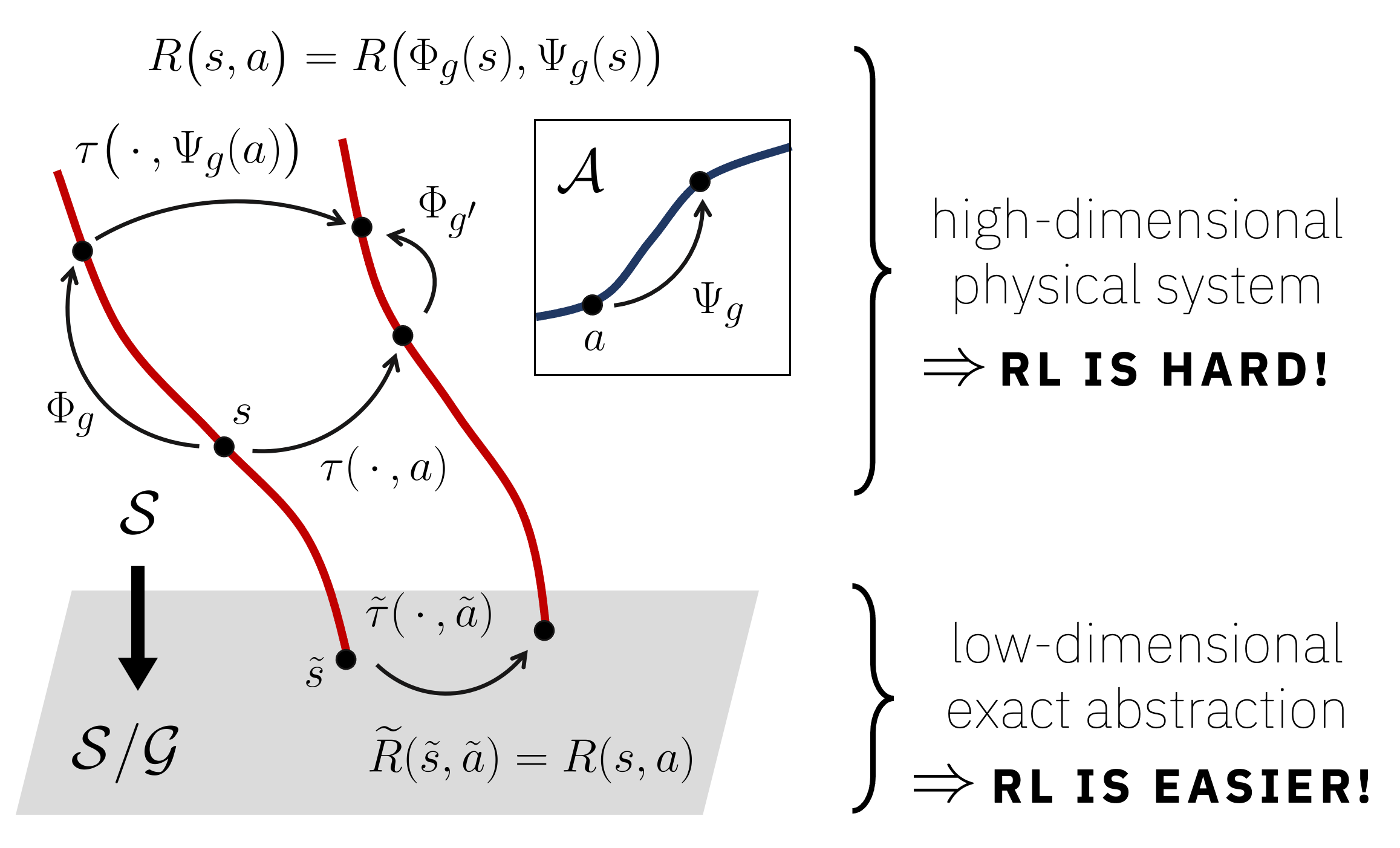 Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic SystemsPratik Kunapuli*, Jake Welde*, Nishanth Rao*, Dinesh Jayaraman, and Vijay KumarICRA 2025, IROS 2024 (Equivariant Robotics Workshop); NeurIPS 2024 (NeurReps Workshop) - Oral (Best Paper Award), 2025
Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic SystemsPratik Kunapuli*, Jake Welde*, Nishanth Rao*, Dinesh Jayaraman, and Vijay KumarICRA 2025, IROS 2024 (Equivariant Robotics Workshop); NeurIPS 2024 (NeurReps Workshop) - Oral (Best Paper Award), 2025Oral, Best Paper Award at NeurReps 2024
Tracking controllers enable robotic systems to accurately follow planned reference trajectories. In particular, reinforcement learning (RL) has shown promise in the synthesis of controllers for systems with complex dynamics and modest online compute budgets. However, the poor sample efficiency of RL and the challenges of reward design make training slow and sometimes unstable, especially for high-dimensional systems. In this work, we leverage the inherent Lie group symmetries of robotic systems with a floating base to mitigate these challenges when learning tracking controllers. We model a general tracking problem as a Markov decision process (MDP) that captures the evolution of both the physical and reference states. Next, we prove that symmetry in the underlying dynamics and running costs leads to an MDP homomorphism, a mapping that allows a policy trained on a lower-dimensional "quotient" MDP to be lifted to an optimal tracking controller for the original system. We compare this symmetry-informed approach to an unstructured baseline, using Proximal Policy Optimization (PPO) to learn tracking controllers for three systems: the Particle (a forced point mass), the Astrobee (a fullyactuated space robot), and the Quadrotor (an underactuated system). Results show that a symmetry-aware approach both accelerates training and reduces tracking error after the same number of training steps.
- ICRA
 Vision Transformers for End-to-End Vision-Based Quadrotor Obstacle AvoidanceAnish Bhattacharya, Nishanth Rao, Dhruv Parikh, Pratik Kunapuli, Nikolai Matni, and Vijay KumarInternational Conference on Robotics and Automation (ICRA), 2025
Vision Transformers for End-to-End Vision-Based Quadrotor Obstacle AvoidanceAnish Bhattacharya, Nishanth Rao, Dhruv Parikh, Pratik Kunapuli, Nikolai Matni, and Vijay KumarInternational Conference on Robotics and Automation (ICRA), 2025We demonstrate the capabilities of an attention-based end-to-end approach for high-speed quadrotor obstacle avoidance in dense, cluttered environments, with comparison to various state-of-the-art architectures. Quadrotor unmanned aerial vehicles (UAVs) have tremendous maneuverability when flown fast; however, as flight speed increases, traditional vision-based navigation via independent mapping, planning, and control modules breaks down due to increased sensor noise, compounding errors, and increased processing latency. Thus, learning-based, end-to-end planning and control networks have shown to be effective for online control of these fast robots through cluttered environments. We train and compare convolutional, U-Net, and recurrent architectures against vision transformer models for depth-based end-to-end control, in a photorealistic, high-physics-fidelity simulator as well as in hardware, and observe that the attention-based models are more effective as quadrotor speeds increase, while recurrent models with many layers provide smoother commands at lower speeds. To the best of our knowledge, this is the first work to utilize vision transformers for end-to-end vision-based quadrotor control.
2023
- BMES ABMEUser-and Speed-Independent Slope Estimation for Lower-Extremity Wearable RobotsJairo Y Maldonado-Contreras, Krishan Bhakta, Jonathan Camargo, Pratik Kunapuli, and Aaron J YoungAnnals of Biomedical Engineering, 2023
Wearable robots can help users traverse unstructured slopes by providing mode-specific hip, knee, and ankle joint assistance. However, generalizing the same assistance pattern across different slopes is not optimal. Control strategies that scale assistance based on slope are expected to improve the feel of the device and improve outcome measures such as decreasing metabolic cost. Prior numerical methods for slope estimation struggled to estimate slopes at variable walking speeds or were limited to a single estimation per gait cycle. This study overcomes these limitations by developing machine-learning methods that yield continuous, user- and speed-independent slope estimators for a variety of wearable robot applications using an able-bodied wearable sensor dataset. In a leave-one-subject-out cross-validation (N = 9), four-phase XGBoost regression models were trained on static-slope (fixed-slope) data and evaluated on a novel subject’s static-slope and dynamic-slope (variable-slope) data. Using all available sensors, we achieved an average error of 0.88° and 1.73° mean absolute error (MAE) on static and dynamic slopes, respectively. Ankle prosthesis, knee-ankle prosthesis, and hip exoskeleton sensor suites yielded average errors under 2° MAE on static and dynamic slopes, except for the ankle prosthesis and hip exoskeleton cases on dynamic slopes which yielded an average error of 2.2° and 3.2° MAE, respectively. We found that the thigh inertial measurement unit contributed the most to a reduction in average error. Our findings suggest that reliable slope estimators can be trained using only static-slope data regardless of the type of lower-extremity wearable robot.
2021
- IEEE RALReal-Time Gait Phase Estimation for Robotic Hip Exoskeleton Control During Multimodal LocomotionInseung Kang, Dean D. Molinaro, Srijan Duggal, Yanrong Chen, Pratik Kunapuli, and Aaron J. YoungIEEE Robotics and Automation Letters, 2021
We developed and validated a gait phase estimator for real-time control of a robotic hip exoskeleton during multimodal locomotion. Gait phase describes the fraction of time passed since the previous gait event, such as heel strike, and is a promising framework for appropriately applying exoskeleton assistance during cyclic tasks. A conventional method utilizes a mechanical sensor to detect a gait event and uses the time since the last gait event to linearly interpolate the current gait phase. While this approach may work well for constant treadmill walking, it shows poor performance when translated to overground situations where the user may change walking speed and locomotion modes dynamically. To tackle these challenges, we utilized a convolutional neural network-based gait phase estimator that can adapt to different locomotion mode settings to modulate the exoskeleton assistance. Our resulting model accurately predicted the gait phase during multimodal locomotion without any additional information about the user’s locomotion mode, with a gait phase estimation RMSE of 5.04 ± 0.79%, significantly outperforming the literature standard (p <; 0.05). Our study highlights the promise of translating exoskeleton technology to more realistic settings where the user can naturally and seamlessly navigate through different terrain settings.
2020
- IEEE TMRBReal-Time Neural Network-Based Gait Phase Estimation Using a Robotic Hip ExoskeletonPratik Kunapuli*, Inseung Kang*, and Aaron J. YoungIEEE Transactions on Medical Robotics and Bionics, 2020
Lower limb exoskeletons provide assistance during the gait cycle using a state variable, one in particular is gait phase. This is crucial for the exoskeleton controller to provide the user accurate assistance. Conventional methods often utilize an event marker to estimate gait phase by computing the average stride time. However, this strategy has limitations in adapting to dynamic speeds. We developed a sensor fusion-based neural network model to estimate the gait phase in real-time that can adapt to dynamic speeds ranging from 0.6 to 1.1 m/s. Ten able-bodied subjects walked with an exoskeleton using our estimator and were provided with corresponding torque assistance. Our best performing model had RMSE below 29 ms and 4% for real-time estimation and torque generation, respectively, reducing the estimation error by 36.0% (p < 0.01) and torque error by 40.9% (p < 0.001) compared to conventional methods. Our results indicate that creating a general user-independent model and additionally training on user-specific data outperforms the user-specific model and user-independent model. Our study validates the feasibility of using a sensor fusion-based machine learning model to accurately estimate the user’s gait phase and improve the controllability of a lower limb exoskeleton.
2019
- ICORRElectromyography (EMG) Signal Contributions in Speed and Slope Estimation Using Robotic ExoskeletonsInseung Kang, Pratik Kunapuli, Hsiang Hsu, and Aaron J. YoungIEEE Proceedings of the International Conference on Rehabilitation Robotics, 2019
Robotic exoskeletons have the capability to improve community ambulation in aging individuals. These exoskeleton controllers utilize different environmental information such as walking speeds and slope inclines to provide corresponding assistance. Several numerical approaches for estimating this environmental information have been implemented; however, they tend to be limited during dynamic changes. A possible solution is a machine learning model utilizing the user’s electromyography (EMG) signals along with mechanical sensor data. We developed a neural network-based walking speed and slope estimator for a powered hip exoskeleton and explored the EMG signal contributions in both static and dynamic settings while wearing the device. We also analyzed the performance of different EMG electrode placements. The resulting machine learning model achieved error rates below 0.08 m/s RMSE and 1.3 RMSE. Our study findings from four able-bodied and two elderly subjects indicate that EMG can improve the performance by reducing the error rate by 14.8% compared to the model using only mechanical sensors. Additionally, results show that using EMG electrode configuration within the exoskeleton interface region is sufficient for the EMG model performance.
- MIL MEDImpedance Control Strategies for Enhancing Sloped and Level Walking Capabilities for Individuals with Transfemoral Amputation Using a Powered Multi-Joint ProsthesisKrishan Bhakta, Jonathan Camargo, Pratik Kunapuli, Lee Childers, and Aaron YoungMilitary Medicine, Dec 2019
Powered prostheses are a promising new technology that may help people with lower-limb loss improve their ability to perform locomotion tasks. Developing active prostheses requires robust design methodologies and intelligent controllers to appropriately provide assistance to the user for varied tasks in different environments. The purpose of this study was to validate an impedance control strategy for a powered knee and ankle prosthesis using an embedded sensor suite of encoders and a six-axis load cell that would aid an individual in performing common locomotion tasks, such as level walking and ascending/descending slopes.Three amputees walked on a treadmill and four amputees walked on a ramp circuit to test whether a dual powered knee and ankle prosthesis could generate appropriate device joint kinematics across users.Investigators found that tuning 2–3 subject-specific parameters per ambulation mode was necessary to render individualized assistance. Furthermore, the kinematic profiles demonstrate invariance to walking speeds ranging from 0.63 to 1.07 m/s and incline/decline angles ranging from 7.8° to 14°.This work presents a strategy that requires minimal tuning for a powered knee \& ankle prosthesis that scales across a nominal range of both walking speeds and ramp slopes.