Pratik Kunapuli

I’m a doctoral student in Computer and Information Science (CIS) at GRASP at the University of Pennsylvania. I am co-advised by Vijay Kumar and Dinesh Jayaraman, and am grateful to be supported by the NSF as a GRFP Fellow. My research interests lie at the intersection of machine learning and robotics, specifically related to using reinforcement learning for control of agile and dynamic systems as well as transferring learning approaches from simulation to the real world (sim2real).
Previously, I completed both my BSc and MSc at Georgia Institute of Technology in Electrical and Computer Engineering. During my time there, I worked with Aaron Young in the Exoskeleton Prosthetic Intelligent Controls Lab (EPIC Lab) initially developing controllers for a powered knee and ankle prosthetic and eventually applying machine learning-based state estimation to autonomous hip exoskeletons. My work culminated in my Masters thesis, “Online Adaptation of User State Estimation in a Powered Hip Exoskeleton using Machine Learning”.
News
| Apr 11, 2025 | The paper Leveling the Playing Field: Carefully Comparing Classical and Learned Controllers for Quadrotor Trajectory Tracking was accepted to RSS 2025 and will be presented in June! Website, paper and code will be available soon. |
|---|---|
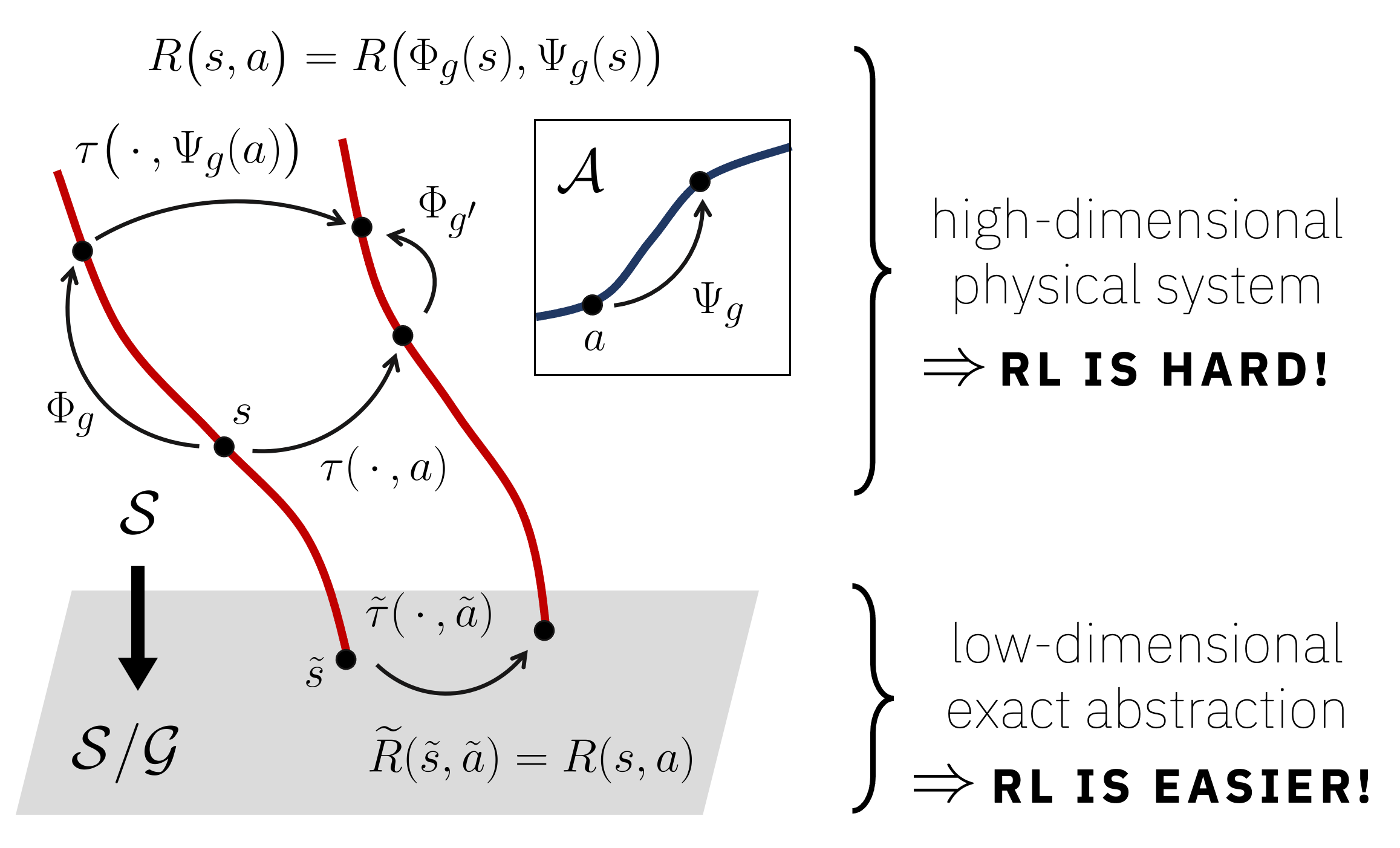
| Feb 10, 2025 | Two papers were accepted to ICRA 2025 in Atlanta this year! Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic Systems and Vision Transformers for End-to-End Vision-Based Quadrotor Obstacle Avoidance will be presented as posters in person. |
| Dec 14, 2024 | Honered that our work Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic Systems was awarded the Best Paper Award in the Neuroscience and Interpretability track in the NeurReps Workshop at NeurIPS 2024! This is one of three best paper awards from the workshop, and this work wouldn’t have been possible without the oustanding work of my co-first-authors Jake Welde and Nishanth Rao! |
| Nov 29, 2024 | Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic Systems was accepted as an oral presentation at the NeurReps workshop at NeurIPS 2024! |
| Oct 11, 2024 | Leveraging Symmetry to Accelerate Learning of Trajectory Tracking Controllers for Free-Flying Robotic Systems will be presented at the SymRob workshop at IROS 2024! |